Inverse Lighting Tutorial
In this tutorial we shall explore the inverse lighting problem. Here, we shall try to reconstruct a target image by optimizing the parameters of the light source (using gradients).
using RayTracer, Images, Zygote, Flux, StatisticsConfiguring the Scene
Reduce the screen_size if the optimization is taking a bit long
screen_size = (w = 300, h = 300)Now we shall load the scene using load_obj function. For this we need the obj and mtl files. They can be downloaded using the following commands:
wget https://raw.githubusercontent.com/tejank10/Duckietown.jl/master/src/meshes/tree.obj
wget https://raw.githubusercontent.com/tejank10/Duckietown.jl/master/src/meshes/tree.mtlscene = load_obj("./tree.obj")Let us set up the Camera. For a more detailed understanding of the rendering process look into Introduction to rendering using RayTracer.jl.
cam = Camera(
lookfrom = Vec3(0.0f0, 6.0f0, -10.0f0),
lookat = Vec3(0.0f0, 2.0f0, 0.0f0),
vup = Vec3(0.0f0, 1.0f0, 0.0f0),
vfov = 45.0f0,
focus = 0.5f0,
width = screen_size.w,
height = screen_size.h
)
origin, direction = get_primary_rays(cam)We should define a few convenience functions. Since we are going to calculate the gradients only wrt to light we have it as an argument to the function. Having scene as an additional parameters simply allows us to test our method for other meshes without having to run Zygote.refresh() repeatedly.
function render(light, scene)
packed_image = raytrace(origin, direction, scene, light, origin, 2)
array_image = reshape(hcat(packed_image.x, packed_image.y, packed_image.z),
(screen_size.w, screen_size.h, 3, 1))
return array_image
end
showimg(img) = colorview(RGB, permutedims(img[:,:,:,1], (3,2,1)))Ground Truth Image
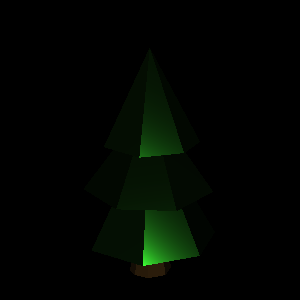
For this tutorial we shall use the PointLight source. We define the ground truth lighting source and the rendered image. We will later assume that we have no information about this lighting condition and try to reconstruct the image.
light_gt = PointLight(
color = Vec3(1.0f0, 1.0f0, 1.0f0),
intensity = 20000.0f0,
position = Vec3(1.0f0, 10.0f0, -50.0f0)
)
target_img = render(light_gt, scene)The presence of zeroonenorm is very important here. It rescales the values in the image to 0 to 1. If we don't perform this step Images will clamp the values while generating the image in RGB format.
showimg(zeroonenorm(target_img))

Initial Guess of Lighting Parameters
We shall make some arbitrary guess of the lighting parameters (intensity and position) and try to get back the image in Ground Truth Image
light_guess = PointLight(
color = Vec3(1.0f0, 1.0f0, 1.0f0),
intensity = 1.0f0,
position = Vec3(-1.0f0, -10.0f0, -50.0f0)
)
showimg(zeroonenorm(render(light_guess, scene)))
We shall store the images in results_inv_lighting directory
mkpath("results_inv_lighting")
save("./results_inv_lighting/inv_light_original.png",
showimg(zeroonenorm(render(light_gt, scene))))
save("./results_inv_lighting/inv_light_initial.png",
showimg(zeroonenorm(render(light_guess, scene))))Optimization Loop
We will use the ADAM optimizer from Flux. (Try experimenting with other optimizers as well). We can also use frameworks like Optim.jl for optimization. We will show how to do it in a future tutorial
for i in 1:401
loss, back_fn = Zygote.forward(light_guess) do L
sum((render(L, scene) .- target_img) .^ 2)
end
@show loss
gs = back_fn(1.0f0)
update!(opt, light_guess.intensity, gs[1].intensity)
update!(opt, light_guess.position, gs[1].position)
if i % 5 == 1
save("./results_inv_lighting/iteration_$i.png",
showimg(zeroonenorm(render(light_guess, scene))))
end
endIf we generate a gif for the optimization process it will look similar to this
This page was generated using Literate.jl.